This week I was exposed to the functioning of Unmanned Aerial Systems (UAS), and was introduced to the different UAV platforms. In the lab, I observed several models of UAV's owned by the UWEC Geography Department. Later, our class went to the field to practice handling the UAC. While on campus, we captured aerial images using the DJI Phantom. After the imagery was collected, I was introduced to three different types of software that can be used for UAS applications. My experiences and results from the lab are detailed below.
Methods
Flight Demonstration
On October 5th, my class went to the floodplain of the Chippewa River, located on the campus of University of Wisconsin - Eau Claire (UWEC). Here, we flew the DJI Phantom along the shore to collect georeferenced aerial imagery. The Phantom is set up to take images rapidly enough that each image will be 70% overlapped with the consecutive image. These qualities will allow us to create a DEM overlaid by a 3D image generated in Pix4D.
Software
1) Pix4D
As described above, Pix4D processes images to create a DEM and 3D high resolution image of the terrain. To generate this image, I was required to select a group of images from a common location. After choosing about 100 images, I imported these into Pix4D. This took about two hours for the program to process the images. Although Pix4D generated several outputs, for my purposes only two images were required. First, I located the Mosaic tif file within the DSM_Ortho folder. Once this was brought into my map document, I adjusted the base height to float on the DSM tif, giving the image elevation values. I also added a shading effect that gave all features a shadow relative to the scene's light position.
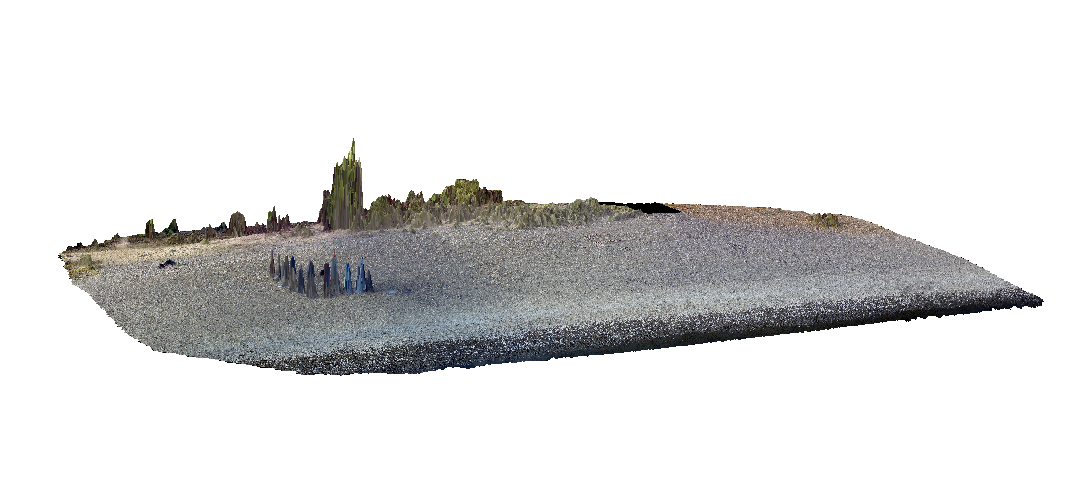 |
| Figure 1a: View 1 of the Pix4D orthomosaic output laid over the DSM output. |
 |
| Figure 1b: View 2 of the Pix4D orthomosaic output laid over the DSM output. |
 |
| Figure 1c: View 3 of the Pix4D orthomosaic output laid over the DSM output. |
Within the Mission Planner program, you are able to plan out your own automated flight missions at any location of interest. This allows you to alter a variety of parameters such UAV type, camera sensor, and altitude to compare how these would affect the data quality and the flight. For example these parameters may alter the following variables: the number of images take, the resolution of the images, the flight time, and the flight path. Comparing how the statistics are altered will help when making educated decision about which parameters are best to use for your study area.
While using Mission Planner, I concluded a few basic assumptions for UAV photography listed below:
1) The higher the altitude, the fewer flight paths. This is related to the camera's Field of View, or in other words the distance a camera captures widthwise within an image. The Field of View increases as the distance from the image's subject increases.
2) The higher the altitude, the shorter the flight time and fewer images required.
3) The higher the altitude, the higher the image resolution (meaning lower image quality).
4) Changing the drone type did not alter the output's variables.
5) The camera does not always have a significant effect on the output's variables.
The following images show how the flight plan and image variables differ from low altitude and high altitude flights.
 |
| Figure 2: This images displays an automatic flight plan of a 3DR_ Aero. The low altitude requires more flight paths, more images, and a longer flight time however provided a high image quality (lower resolution). |
 |
| Figure 3: This images displays an automatic flight plan of a 3DR_ Aero. The high altitude requires less flight paths, less images, and a shorter flight time however provided a lower image quality (higher resolution). |
3) Real Flight Simulator
While using the real flight simulator I flew several types of fixed wing and multirotor aircraft. This program allows you to select from a variety of different UAVs and environments. After testing out many of the options, I selected two UAVs to fly for at least a half an hour each. For the fixed wing aircraft, I chose a model called Pipercub, and for the multirotor I chose the X8 Quadcopter 1260. Below are my observations.
Multirotor: X8 Quadcopter 1260
I first flew the multirotor, which I soon learned flies extremely slow. Although it did not travel to a different location rapidly, the device was extremely easy to maneuver. Additionally, the multirotor allowed to be stall in place while in the air making the device stable. On the other hand, I was able to orient myself in a new direction almost instantaneously. The flight for the X8 is about 15 minutes.
{kind=link}

Fixed Wing: Piper Cub
Next I flew the fixed wing plane. This aircraft was difficult to take off in certain environments, as well as navigate once I was in the air. Although the plane flew much faster and therefore covered a much larger distance in a shorter amount of time, the device was difficult to maneuver. Additionally, there was no option to hoover in place, unlike the Quadcopter. As I continued to navigate the plane, it became easier to turn sharper but overall the fixed wing plane requires a large space to make a 90 degree turn unlike the multirotor. Lastly, the flight time for the Piper cub is about 2 hours.

After flying both platforms, it is clear they should each be used for different data collection applications. The fixed wings would be preferred for larger areas due to its longer flight time, fast speed, and requirement of large turn around area, whereas the multirotors would be best for smaller areas due to its shorter flight time, slow speed, and ability to orient rapidly.
Metadata
What
|
This is the metadata for the imagery taken with the UWEC Geography Department's DJI Phantom. These images were used to generate figures 1a-c from the program Pix4D.
|
Who
|
UWEC Fall 2015 Geography 336 course.
|
When
|
Images were taken on October 5th, 2015.
|
Where
|
The images used in figures 1a-c were taken of the floodplain of the Chippewa River, on the campus of the University of Wisconsin – Eau Claire.
|
How
|
UAS Scenario
While working as a UAS consultant, many different scenarios will arise from interested clients from a variety of backgrounds. Listed below is a real life scenario that my professor Dr. Joseph Hupy encountered working as a consultant.
"An atmospheric chemist is looking to place an ozone monitor, and other meteorological instruments onboard a UAS. She wants to put this over Lake Michigan, and would like to have this platform up as long as possible, and out several miles if she can." I believe the most effective way to approach this situation is as followed:
Two key variables to analyze are the time and the distance the UAV is required to travel. The client requests that the monitors be exposed to the study area for a maximum amount of time, as well as travel for several miles. As previously stated, fixed wing aircraft express several characteristics that allow it them to perform most effectively in wide spread areas. According to an article by QuestUAV, fixed wings aircraft structures, in comparison to multirotor structure, are inherently more simple and aerodynamic ensuring longer times at higher speeds.
Another key variable to analyze is what equipment the UAV will be carrying. Here, the chemist states that the UAV must carry an ozone monitor and other meteorological instruments. This suggests that the UAV will carry a high weight load. Again, according the QuestUAV, fixed winged aircraft are able to carry a greater weight while using less power than multirotor. Although the weight of the instruments is unknown, it would be an important factor to investigate further if the weight exceeds the limits of a multirotor.
Ultimately, due to the long distance and maximum time required a fixed wing would be the most effective platform to survey the study area.
Discussion
In conclusion, UASes have an extremely useful role in mapping applications. The use of UASes in combination with aerial photography and GPS systems allows users to create extremely accurate terrain maps. This advancement in mapping technology saves geographers and potential clients both time and money. As noted during my methods, images can be collected in the field of a small plot of land in a matter of a few minutes, or of a larger several square miles of land within a few hours. Additionally, there is a variety of software such as Pix4D that allows users to process these images rapidly, which can be used to investigate a variety of problems or questions about the land of interest.
The two platforms of UASes, fixed wing and multirotor, allow UAV specialists to use this equipment for a variety of applications. For example, in the UAS Senario in the methods section, we see UASes can be used for meteorological data collection. In addition to this, within my professors UAS consulting business he has come across other potential scenarios such as drainage modeling, identifying crop health, surveying wildlife habitats, bridge inspections, and identifying oil pipe line leakages. It is clear that UAS are a valuable advancement to mapping applications.
Conclusions
Although a UAS specialists must collect and process UAS data, geographers are not the only individuals to benefit from their usage. The combination of collecting aerial photography that is georeferenced makes UAS a vary useful field. The vast usages of UASes can assist a variety of individuals such as geographers, farmers, scientists, land owners, city planners, building inspectors, and military and governmental officials.
Sources
http://www.questuav.com/news/fixed-wing-versus-rotary-wing-for-uav-mapping-applications
http://www.directionsmag.com/entry/top-five-things-you-need-to-know-about-drones-and-gis/414810
http://www.esri.com/esri-news/arcuser/spring-2014/uav-and-gis-an-emerging-dynamic-duo
No comments:
Post a Comment